
J Orthop Surg Res:智能机器人辅助骨折复位系统用于治疗不稳定骨盆骨折
2024-05-10 医路坦克 MedSci原创 发表于上海

本研究的目的是分析RAFR系统的安全性和有效性,并探讨其关键技术和存在的问题。
骨盆骨折占所有骨折的2% ~ 8%,可表现为各种高能和低能损伤,各种移位方式,常合并腹部和盆腔器官损伤和大出血。在所有骨折中,致残率和死亡率最高,致残率约为60%,死亡率达8% ~ 14%。准确的微创闭合复位是微创治疗不稳定骨盆骨折的基础研究表明,骨折复位不良与内固定失败、骨折不愈合、术后持续疼痛、步态改变、行走困难等密切相关,严重影响患者的工作和生活,提高复位质量可带来更好的功能效果。

切开复位、徒手闭合复位和框架辅助复位都过分依赖于外科医生的经验和技术。切开复位与损伤水平升高、出血量增加、恢复时间延长、复位结果满意度降低以及并发症和致残率升高有关。常规透视引导下徒手闭合复位仅适用于移位最小的骨折和相对简单的骨折。此外,目前的约简框架过于笨重,无法实现多维精确的约简操作。随着机器人技术的发展,骨盆骨折的机器人辅助治疗越来越受欢迎,但主要集中在骨盆骨折固定方面,较少涉及机器人辅助骨折复位。目前,临床上还没有一种基于三维图像引导的智能串行RAFR系统能够真正用于复杂骨盆骨折的微创复位。
在本研究中,我们使用了世界上第一个也是唯一一个用于复杂骨盆骨折微创复位的智能RAFR系统,该系统于2023年12月11日获得了中国国家药品监督管理局(NMPA)颁发的III类医疗器械注册证。该研究包括20例不稳定骨盆骨折患者,他们接受了机器人辅助微创闭合复位和经皮螺钉内固定。本研究的目的是分析RAFR系统的安全性和有效性,并探讨其关键技术和存在的问题。
方法:RAFR系统基于患者术前三维(3D) CT扫描,智能设计最佳复位路径和靶位。复位机械臂根据预先规划的复位路径自动复位受影响的半骨盆。
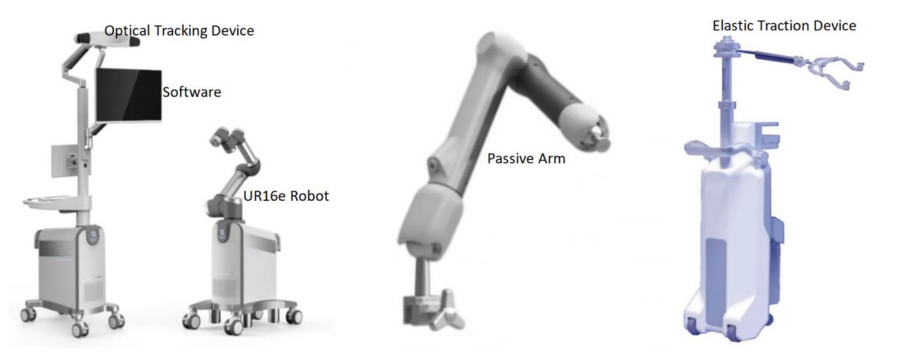
智能RAFR系统组成
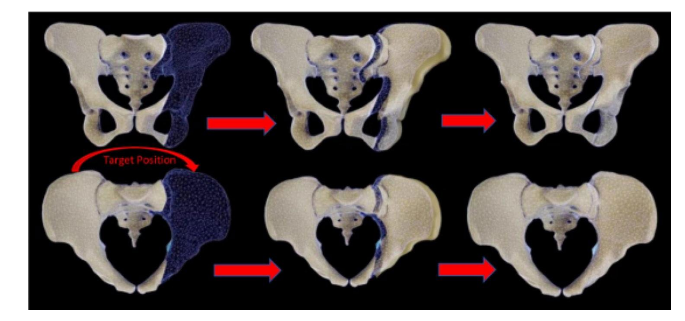
镜像匹配后的智能缩减规划流程示意图

RAFR系统在手术室的空间位置

核心手术流程图
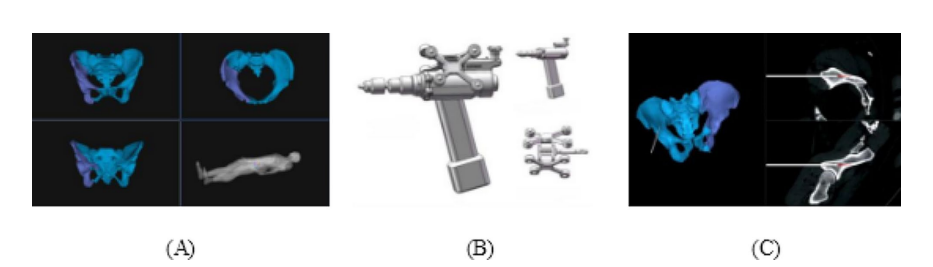
(A)图像配准后,可以实时跟踪骨盆位置并显示在屏幕上。(B)导航手钻的结构组成。(C)握钉位置和深度的实时三维可视化
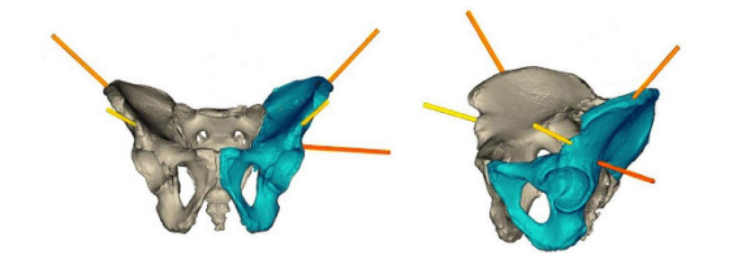
五个针的位置
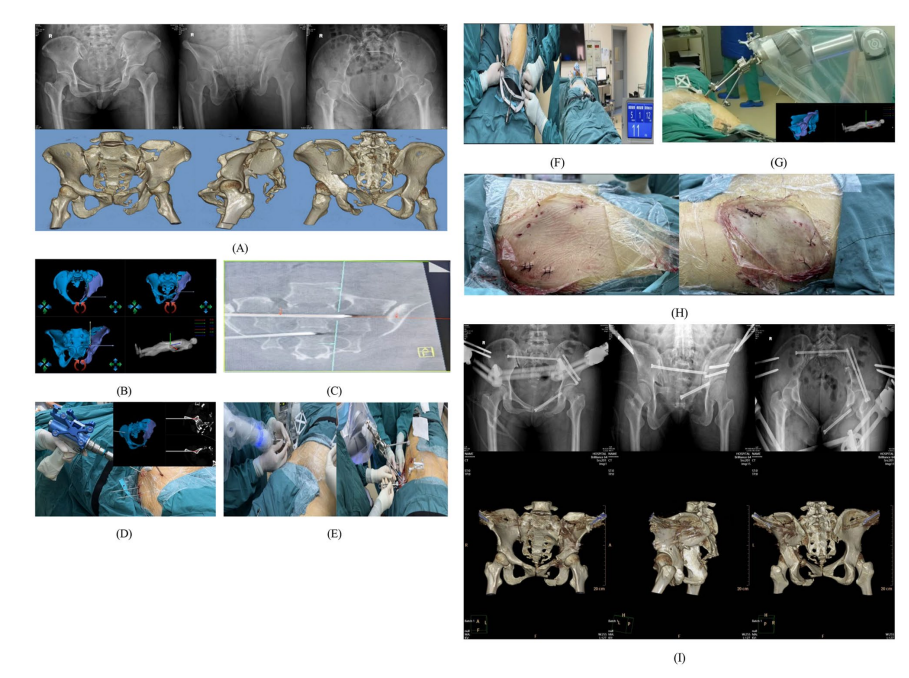
病例描述:(A)术前x线和三维CT图像描述患者的状态。(B)术前规划复位路径后,对路径和目标位置进行微调。(C)从骨盆后环未受影响的一侧预先置入两枚骶髂螺钉导向销。复位后,这些导针可直接穿透患侧骶髂关节,促进后环的临时固定。或者,它们可以通过受累侧骨盆的皮肤引导骶髂螺钉固定后环。(D)实时三维导航下插入Schantz针。(E) 5个Schantz引脚与保持装置建立连接。(F)将股骨髁牵引销与弹性牵引装置连接。(G)在实时三维导航的监督下,机械臂沿预先规划的复位路径自主移动患半骨盆,实现自主复位。(H)皮肤切口。(1)术后x线和3D CT图像说明患者的预后
结果:平均残余位移为6.65±3.59 mm。根据Matta的标准,优秀7个,良好10个,一般3个,优良率为85%。无术后并发症发生。
结论:在我们的研究中,RAFR系统可以为大多数不稳定骨盆骨折患者完成准确、微创的闭合复位,可以达到良好的骨折复位质量和短期疗效。
本网站所有内容来源注明为“梅斯医学”或“MedSci原创”的文字、图片和音视频资料,版权均属于梅斯医学所有。非经授权,任何媒体、网站或个人不得转载,授权转载时须注明来源为“梅斯医学”。其它来源的文章系转载文章,或“梅斯号”自媒体发布的文章,仅系出于传递更多信息之目的,本站仅负责审核内容合规,其内容不代表本站立场,本站不负责内容的准确性和版权。如果存在侵权、或不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
在此留言




#智能机器人辅助骨折复位系统# #不稳定骨盆骨折#
9